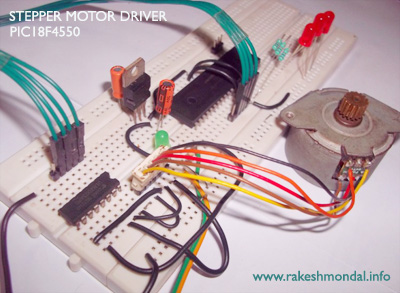
Stepper Motor Driver using PIC18F4550
Stepper motor Interface to PIC18F4550
The Microcontroller cycles three modes of stepper motor stepping such as Single, Half wave stepping and Full wave stepping with a delay of 2-3 seconds of delay in between. The Stepper motor Drive is coded with mplab x ide and XC8 Compiler.
Stepper Motor Source code
The Stepper Motor coils are connected to PIC18F4550 pins, RD4, RD5, RD6 and RD7, and then these pins are interfaced with ULN2003.
Stepper Motor Schematic PIC18F4550
According two the two source code posted here, two schematic is posted. The power source is common for both ULN2003 and pic18F4550 hence an IC 7805 to maintain input constant at 5 V.
Stepper Motor Project
Download and install mplab x ide along with XC8 Compiler (Either windows and Linux) and then download the project from the link below.
Run the project and burn the firmware into the microcontroller using your favorable microcontroller programmer such as JDM programmer or PICKIT2 programmer.
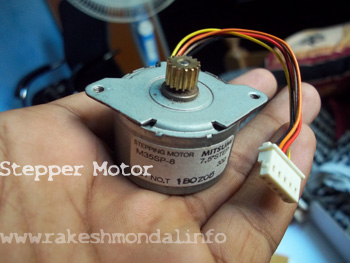
Testing the Stepper Motor
Testing the Stepper Pulse
After burning the stepper motor with the source code, Before interfacing the Microcontroller to the PIC18F4550, to test - few LED’s are connected across the
Microcontroller pins, just to make sure if the pulses are getting
generated the way as it is supposed to be for the stepper motor. After successful testing the Stepper Motor will be interfaced with the microcontroller via ULN2003.
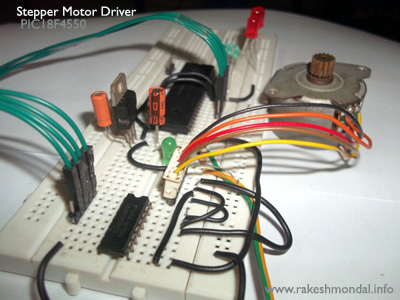
After successfully testing the stepper motor pulse generated by the microcontroller , connect the stepper Motor across the microcontroller through the uln2003 IC.
Please refer my next tutorial for running a stepper motor using a computer via USB communication.
Thanks for Watching
Related post
USB STEPPER MOTOR DRIVER
Collection of Stepper Motor Tutorials and Projects
